◆ Init()
| override void UnitySensors.ROS.Serializer.Sensor.LaserScanMsgSerializer.Init |
( |
| ) |
|
|
virtual |
◆ OnDestroy()
| override void UnitySensors.ROS.Serializer.Sensor.LaserScanMsgSerializer.OnDestroy |
( |
| ) |
|
|
virtual |
◆ Serialize()
| override LaserScanMsg UnitySensors.ROS.Serializer.Sensor.LaserScanMsgSerializer.Serialize |
( |
| ) |
|
◆ SetSource()
◆ _gaussianNoiseSigma
| float UnitySensors.ROS.Serializer.Sensor.LaserScanMsgSerializer._gaussianNoiseSigma = 0.0f |
|
private |
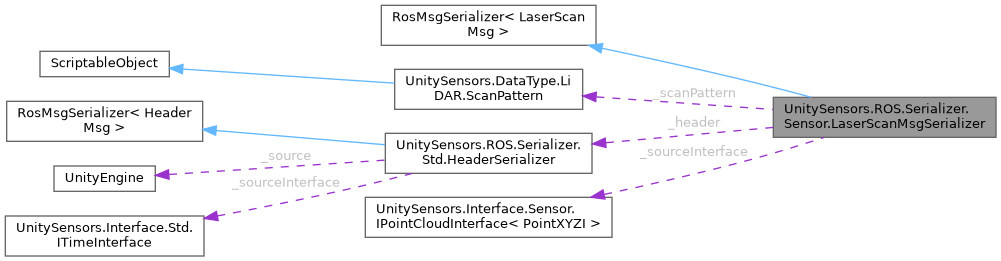
◆ _header
| HeaderSerializer UnitySensors.ROS.Serializer.Sensor.LaserScanMsgSerializer._header |
|
private |
◆ _maxRange
| float UnitySensors.ROS.Serializer.Sensor.LaserScanMsgSerializer._maxRange = 100.0f |
|
private |
◆ _minRange
| float UnitySensors.ROS.Serializer.Sensor.LaserScanMsgSerializer._minRange = 0.5f |
|
private |
◆ _pointsNum
| int UnitySensors.ROS.Serializer.Sensor.LaserScanMsgSerializer._pointsNum |
|
private |
◆ _scanPattern
| ScanPattern UnitySensors.ROS.Serializer.Sensor.LaserScanMsgSerializer._scanPattern |
|
private |
◆ _sourceInterface
The documentation for this class was generated from the following file:
 Public Member Functions inherited from UnitySensors.ROS.Serializer.RosMsgSerializer< LaserScanMsg >
Public Member Functions inherited from UnitySensors.ROS.Serializer.RosMsgSerializer< LaserScanMsg >
