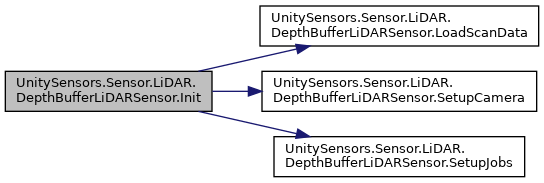
◆ Init()
| override void UnitySensors.Sensor.LiDAR.DepthBufferLiDARSensor.Init |
( |
| ) |
|
|
protected |
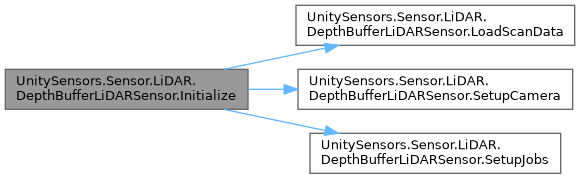
◆ Initialize()
| override void UnitySensors.Sensor.LiDAR.DepthBufferLiDARSensor.Initialize |
( |
| ) |
|
|
virtual |
◆ LoadScanData()
| void UnitySensors.Sensor.LiDAR.DepthBufferLiDARSensor.LoadScanData |
( |
| ) |
|
|
private |
◆ OnSensorDestroy()
| override void UnitySensors.Sensor.LiDAR.DepthBufferLiDARSensor.OnSensorDestroy |
( |
| ) |
|
|
protected |
◆ SetupCamera()
| void UnitySensors.Sensor.LiDAR.DepthBufferLiDARSensor.SetupCamera |
( |
| ) |
|
|
private |
◆ SetupJobs()
| void UnitySensors.Sensor.LiDAR.DepthBufferLiDARSensor.SetupJobs |
( |
| ) |
|
|
private |
◆ UpdateSensor()
| override IEnumerator UnitySensors.Sensor.LiDAR.DepthBufferLiDARSensor.UpdateSensor |
( |
| ) |
|
|
protected |
◆ _cameras
| List<UnityEngine.Camera> UnitySensors.Sensor.LiDAR.DepthBufferLiDARSensor._cameras = new List<UnityEngine.Camera>() |
|
private |
◆ _camerasNum
| int UnitySensors.Sensor.LiDAR.DepthBufferLiDARSensor._camerasNum = 0 |
|
private |
◆ _depthBufferLidarMat
| Material UnitySensors.Sensor.LiDAR.DepthBufferLiDARSensor._depthBufferLidarMat |
|
private |
◆ _directions
| NativeArray<float3> UnitySensors.Sensor.LiDAR.DepthBufferLiDARSensor._directions |
|
private |
◆ _horizontalFOV
| float UnitySensors.Sensor.LiDAR.DepthBufferLiDARSensor._horizontalFOV |
|
private |
◆ _jobHandle
| JobHandle UnitySensors.Sensor.LiDAR.DepthBufferLiDARSensor._jobHandle |
|
private |
◆ _noises
| NativeArray<float> UnitySensors.Sensor.LiDAR.DepthBufferLiDARSensor._noises |
|
private |
◆ _pixelIndices
| NativeArray<int> UnitySensors.Sensor.LiDAR.DepthBufferLiDARSensor._pixelIndices |
|
private |
◆ _pixels
| NativeArray<Color> UnitySensors.Sensor.LiDAR.DepthBufferLiDARSensor._pixels |
|
private |
◆ _rasterizeScans
| bool UnitySensors.Sensor.LiDAR.DepthBufferLiDARSensor._rasterizeScans = false |
|
private |
◆ _rt
| RenderTexture UnitySensors.Sensor.LiDAR.DepthBufferLiDARSensor._rt |
|
private |
◆ _singleCameraFOV
| float UnitySensors.Sensor.LiDAR.DepthBufferLiDARSensor._singleCameraFOV = 60.0f |
|
private |
◆ _texture
| Texture2D UnitySensors.Sensor.LiDAR.DepthBufferLiDARSensor._texture |
|
private |
◆ _textureLoader
| TextureLoader UnitySensors.Sensor.LiDAR.DepthBufferLiDARSensor._textureLoader |
|
private |
◆ _texturePixelsNum
| int UnitySensors.Sensor.LiDAR.DepthBufferLiDARSensor._texturePixelsNum = 1 |
|
private |
◆ _textureSizePerCamera
| Vector2Int UnitySensors.Sensor.LiDAR.DepthBufferLiDARSensor._textureSizePerCamera |
|
private |
◆ _textureToPointsJob
◆ _transform
| Transform UnitySensors.Sensor.LiDAR.DepthBufferLiDARSensor._transform |
|
private |
◆ _updateGaussianNoisesJob
The documentation for this class was generated from the following file:

 Public Member Functions inherited from UnitySensors.Sensor.UnitySensor
Public Member Functions inherited from UnitySensors.Sensor.UnitySensor