Loading...
Searching...
No Matches
Public Member Functions |
Protected Member Functions |
Properties |
Private Attributes |
List of all members
UnitySensors.Sensor.LiDAR.LiDARSensor Class Referenceabstract
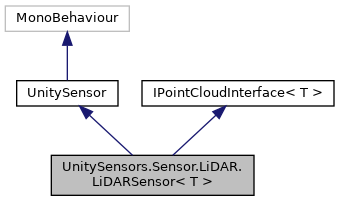
Inheritance diagram for UnitySensors.Sensor.LiDAR.LiDARSensor:
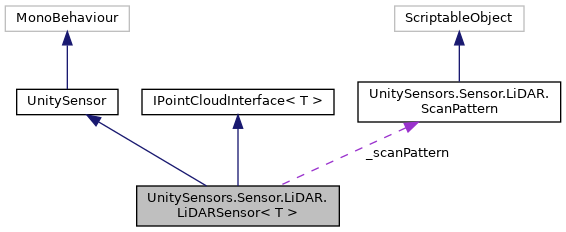
Collaboration diagram for UnitySensors.Sensor.LiDAR.LiDARSensor:
Public Member Functions | |
| virtual void | Initialize () |
 Public Member Functions inherited from UnitySensors.Sensor.UnitySensor Public Member Functions inherited from UnitySensors.Sensor.UnitySensor | |
| virtual IEnumerator | UpdateSensorOnce () |
Protected Member Functions | |
| override void | Init () |
| override void | OnSensorDestroy () |
| Protected Member Functions inherited from UnitySensors.Sensor.UnitySensor | |
| void | Init () |
| IEnumerator | UpdateSensor () |
| void | OnSensorDestroy () |
Properties | |
| ScanPattern | scanPattern [get] |
| float | minRange [get] |
| float | maxRange [get] |
| float | gaussianNoiseSigma [get] |
| float | maxIntensity [get] |
| PointCloud< PointXYZI > | pointCloud [get] |
| int | pointsNum [get] |
| Properties inherited from UnitySensors.Sensor.UnitySensor | |
| float | dt [get] |
| float | time [get] |
| float | frequency [get, set] |
| Properties inherited from UnitySensors.Interface.Std.ITimeInterface | |
| Properties inherited from UnitySensors.Interface.Sensor.IPointCloudInterface< PointXYZI > | |
| PointCloud< T > | pointCloud [get] |
| int | pointsNum [get] |
Private Attributes | |
| ScanPattern | _scanPattern |
| int | _pointsNumPerScan = 1 |
| float | _minRange = 0.5f |
| float | _maxRange = 100.0f |
| float | _gaussianNoiseSigma = 0.0f |
| float | _maxIntensity = 255.0f |
| PointCloud< PointXYZI > | _pointCloud |
Additional Inherited Members | |
| Public Attributes inherited from UnitySensors.Sensor.UnitySensor | |
| Action | onSensorUpdateComplete |
| Package Attributes inherited from UnitySensors.Sensor.UnitySensor | |
| float | _frequency = 10.0f |
Member Function Documentation
◆ Init()
|
protected |
Here is the call graph for this function:

◆ Initialize()
|
virtual |
Reimplemented in UnitySensors.Sensor.LiDAR.DepthBufferLiDARSensor, and UnitySensors.Sensor.LiDAR.RaycastLiDARSensor.
Here is the caller graph for this function:

◆ OnSensorDestroy()
|
protected |
Here is the call graph for this function:

Member Data Documentation
◆ _gaussianNoiseSigma
|
private |
◆ _maxIntensity
|
private |
◆ _maxRange
|
private |
◆ _minRange
|
private |
◆ _pointCloud
|
private |
◆ _pointsNumPerScan
|
private |
◆ _scanPattern
|
private |
Property Documentation
◆ gaussianNoiseSigma
|
getprotected |
◆ maxIntensity
|
getprotected |
◆ maxRange
|
getprotected |
◆ minRange
|
getprotected |
◆ pointCloud
|
get |
◆ pointsNum
|
get |
◆ scanPattern
|
getprotected |
The documentation for this class was generated from the following file:
- Packages/UnitySensors/Runtime/Scripts/Sensors/LiDAR/LiDARSensor.cs